下肢康复轮椅机器人包括:下肢康复模块和人机交互模块,其中康复模块是通过康复机构的拓扑变胞过程,实现人体踝关节、膝关节及髋关节的单项或组合康复训练。并设计了一种基于扭簧的变刚度柔性关节,使康复机构不仅具有被动变刚度特性,而且具有主动变刚度特性,提高了下肢康复机构的运动灵活性。同时通过肌电传感器(sEMG)、视觉传感器等技术采集人体下肢及轮椅机构的运动信息,通过交互模块获取人体下肢康复数据,按照使用者的下肢肌肉活动状态实现被动式康复训练、主动式康复训练及抗阻式康复训练要求。
下肢康复机构控制系统由上位机、中控系统、驱动机构组成,各关节处均配置谐波减速器以满足其灵活性、柔顺性的使用要求。能够通过示教系统获取日常行为任务信息,并通过自主分割、轨迹自主生成等技术在新环境下再现示教,从而帮助使用者完成各种日常任务及简单护理要求。
人机交互模块是客户与各个模块沟通的主要媒介,使用者通过上位机操作控制下肢康复机构进行各项功能实现。
应用范围:
可以应于康复机构、康复中心以及家庭对下肢残疾人实现踝关节、膝关节及髋关节的康复训练,可以实现下肢残疾人的主动训练、被动训练
及抗阻训练,进一步提高他/她们的生活自理能力。
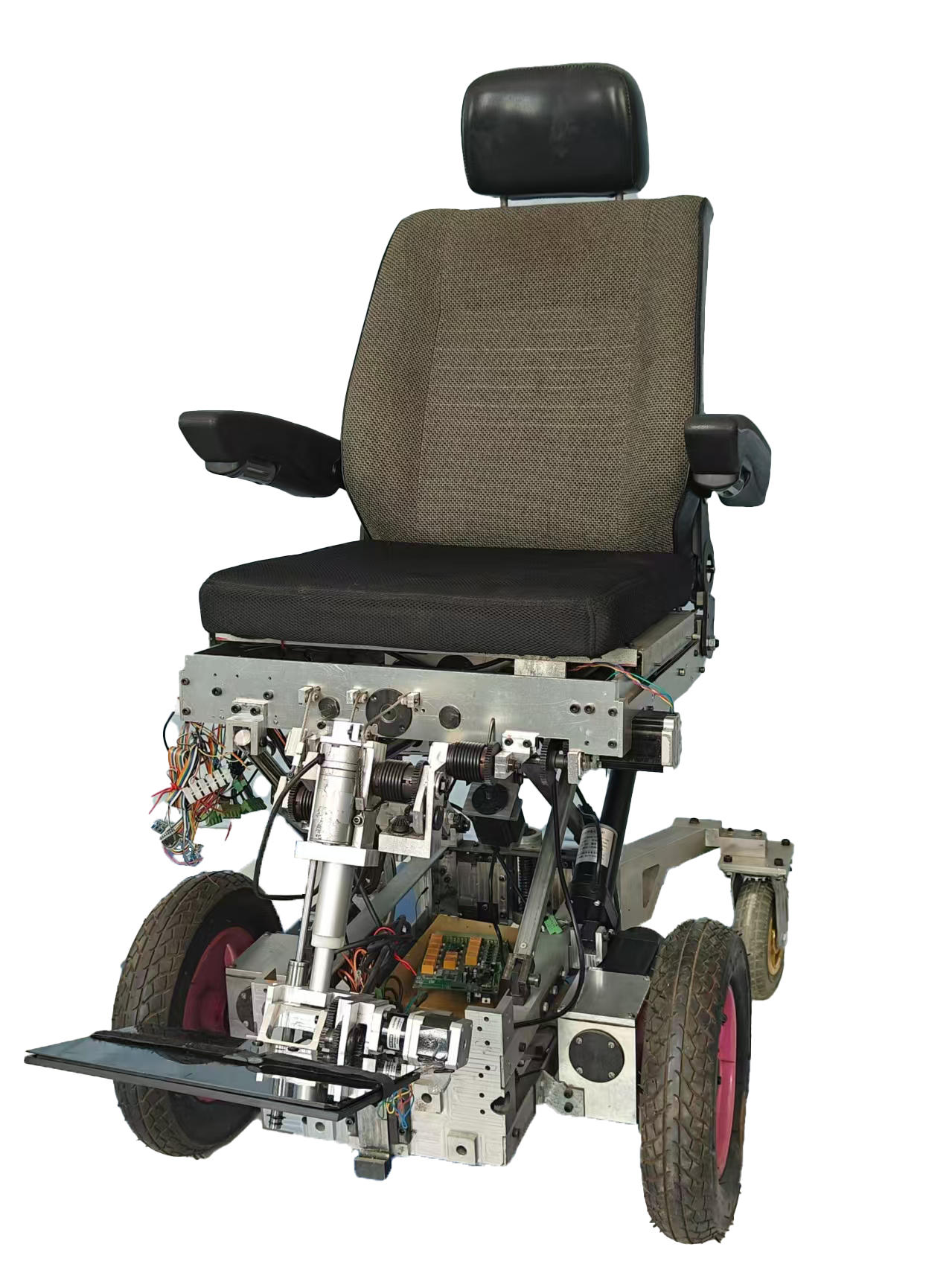
产品参数:
高度:1500m
电压:DC48V/24V, 1KW
运行速度:0~2m/s
康复运动:自主调节
关节刚度:0~30NM/rad
重量:80KG