
将轮与腿有效的结合在一起能够有效的适应于复杂的全地形环境变化,通过多传感器融合技术自主感知周围环境、识别复杂地形及障碍物,能够实现在负重状态下进行自主决策,显著提高在复杂环境下物资保障效率。
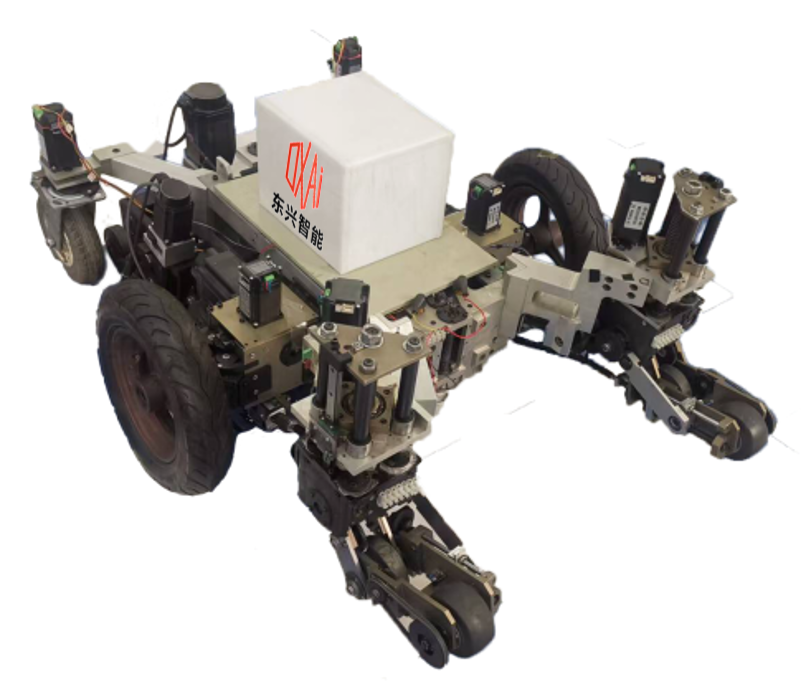
由前腿机构、后腿机构、底盘机构、传动机构、控制系统等部分组成,工作过程中可以携带重达150公斤物体灵活地穿梭于复杂地形环境。其中前腿机构与后腿机构是由轮腿复合式构成的3自由度可执行机构,前后四条腿可以独立进行工作适应复杂地形变化,而后腿携带的多个排轮可以适应较为平缓地段工作,机器人移动过程中根据地形环境可以实现两驱、四驱、六驱、八驱的灵活切换,前后腿携带轮可以灵活的浮动以保证在复杂环境下适应能力。
前腿不仅可以升降,而且可以前伸、后缩与上抬、下伸,从而可以适应复杂地形起伏变化,当两条腿协同作业时可以应对复杂工况环境。后腿可以实现前后角度调整,从而可以实现机器人重心调整,而后腿浮动轮距离调整可以提升后腿高度以增强机器人向前推动力。
性能指标如下: